微机械陀螺阻尼特性及正交误差抑制研究当前位置:首页 > 科学技术 > 研究进展
微机械陀螺阻尼特性及正交误差抑制研究
文章来源:科技信息中心编辑室 时间:2019-06-03 访问数:
共1页 1
为提高微陀螺的机械品质因子Q值及其检测灵敏度,通常采用真空封装,但是在长期贮存条件下,由于漏率的影响,器件的内部气压变化(漏气是缓慢过程,且不可逆转)会导致器件性能下降甚至失效。因此针对高可靠性应用场合,需研究低Q值微陀螺。
采用低Q值微陀螺方案,可以降低对驱动/检测模态频率匹配的要求程度,因为频率失配通常是由于加工误差造成的,也即降低了工艺要求。但是微加工的相对加工误差大,仍然会产生机械耦合误差,该误差存在于陀螺的输出信号中,即所谓的“正交误差”。为提高器件性能,需要对正交误差进行分析及抑制。
1 低Q值表芯结构设计
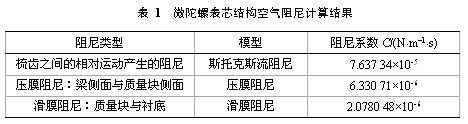
为实现结构在常压下驱动模态谐振以及哥氏力检测,设计了变交叠面积的梳齿结构,如图1所示,采用解析及数值模拟方法分析了表芯结构所受气膜阻尼的影响。结果表明,表芯微结构主要受斯托克斯流(stokes flow)阻尼作用,图2显示了各种阻尼的占比,表1给出了具体阻尼系数量值。以驱动幅值为设计约束,综合考虑静电力和阻尼力,对结构优化设计,设计结果为:驱动幅值5 μm,机械品质因子200。
2 正交抑制
如图3所示,采用有限元方法,计算由于工艺误差导致的梁宽不等所引起耦合刚度,结果表明目前工艺条件下的结构耦合刚度约为0.15 N/m。采用图4的抑制结构,可提供1.2 N/m的静电力负刚度,足够抵消耦合刚度。
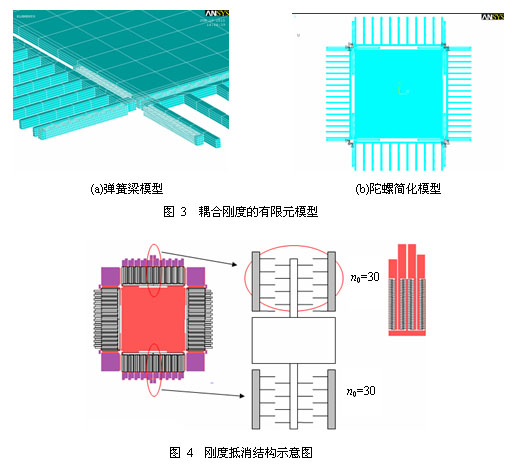
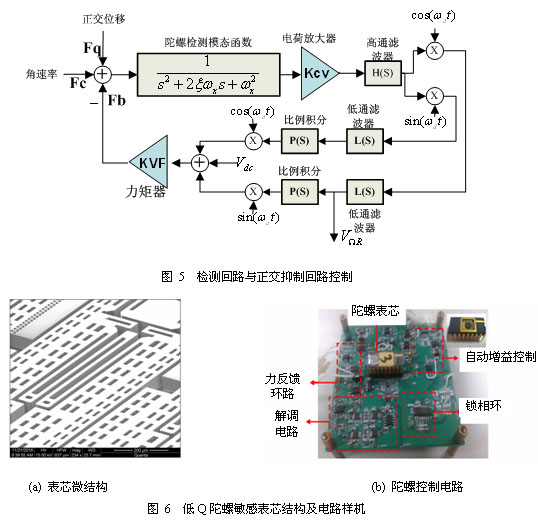
图5给出了陀螺解调电路框图,高频载波采用二极管实现自适应解调,陀螺的输出正交信号及输出信号由开关解调实现。
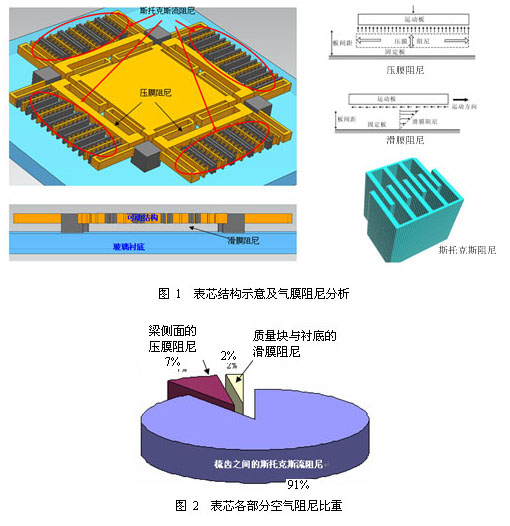
图6是制作的样机,非真空封装,量程±360(°)/s,非线性度0.9%。